Éste es Raider (pasó de llamarse "droide" a Raider cuando dejó de parecer un Bioloid soso).
A lo largo de cinco cortos meses
he estado preparando este robot para el campeonato nacional CEABOT.
Me encantaría decir en qué posición
quedó, con qué estoy contento y qué pienso que podría mejorar.
Pero lo cierto es que Raider y yo no tuvimos demasiada suerte en
Terrassa. Mala suerte hasta el punto de que no pudimos participar en
la prueba que habíamos preparado todo este tiempo.
En los entrenamientos del primer dia
solté a Raider en la pista y tras dar unos diez pasos empezaron a
ocurrir “cosas raras”. Dicho de otro modo, rotura y abandono.
No voy a negar que me llevé un
disgusto y una frustración terrible, pero de los errores se aprende,
y sin duda en una semana he aprendido mas que en varios meses.
El caso es que me voy a despedir de
Raider tal y como lo conozco. Todo proyecto tiene su fin y éste ya
forma parte del pasado. Lo bonito quizás, es que cerraré un
proyecto pero abriré dos nuevos. No quiero alargame en esta entrada,
pero a modo de pequeño spoiler, pronto hablaré del proyecto MYOD
y de Raider 2.0
Pero antes de
nada, voy a destripar a Raider y comentar un poco sus tripas :)
¡Comienza el
desmontaje!

Figura 1. Protector de la electrónica.
Raider llevaba un
configuración de dos placas en su espalda. La CM900 nos dió
muchísimos problemas con el puerto TTL (que era lo unico bueno de la
placa a decir verdad). En palabras de uno de los desarrolladores de
la placa:
“This
problem is caused by our mistake in desigining circuit of CM-900. I
am sorry for the mistake.”
“We
stopped selling CM-900 for some problem in TTL circuit. ”
Por
tanto, con el objetivo de reducir resposabilidades, opté por montar
una segunda placa al robot. Esta micro-placa es una Teensy 3.0; y me
sorprendió desde el primer dia por
lo bien que funcionaba.
De
esta forma, el flujograma del robot y la programación de los
movimientos se encontraba en la placa CM900; mientras que la lectura
de los sensores (Ultrasonidos, dos infrarrojos, brújula,
acelerómetro, giroscopo y dos RGB en los pies) y su procesamiento
eran tarea de la Teensy.
¿Ventajas?
Programación independiente, poder variar una de ellas mientras la
otra sigue funcionando y, lo mas importante, la posibilidad de
sustituir una de ellas pudiendo conservar la otra.
En
la figura 2, a la derecha CM900, a la izquierda Teensy. (He
quitado los cables de conexión entre placas para la foto)

Figura 2. CM900 y Teensy.
Ambas
fueron montadas sobre una placa de prototipado (figura 3), donde
conectaba directamente los sensores, actuadores y alimentación.

Figura 3. Base de las controladoras.
A
dia de hoy, veo un poco cutre el acabado que conseguí con la placa.
Sobre todo con las conexiones (que pienso que pudieron ser la
causa del cortocircuito que destrozó toda la electrónica)
En
la figura 4 muestro una imagen de la parte que quedaba por dentro,
donde se encontraban todas las conexiones.


Figura 4. PCB de prototipado.

Figura 5. Chasis.
El
“bocata” total antes de ser montado meses atrás lucía este
saludable aspecto (figura 6)
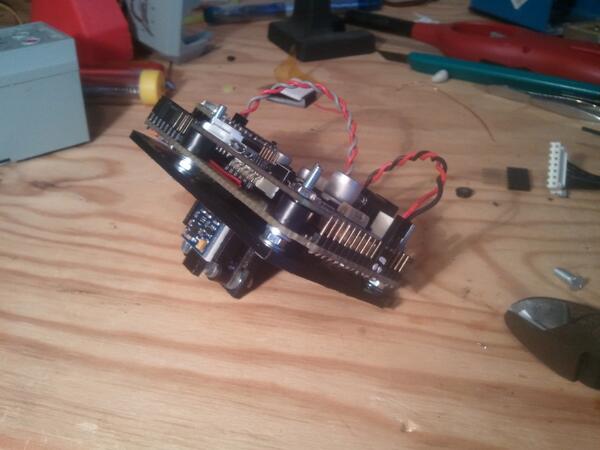
Figura 6. Bloque electrónico.
Y
creo que por hoy es suficiente. Los códigos utilizados están
subidos en mi repositorio.
Entonces,
¿Cual es el futuro de Raider? A grandes rasgos...







